









Cảm Biến gia tốc GY-521 6DOF IMU MPU6050
Mã sản phẩm: (Đang cập nhật...)
Thương hiệu: cập nhật
Còn hàng
Liên hệ


Freeship đơn hàng từ 500k

Kiểm tra khi nhận hàng

Hỗ trợ khách hàng 24/7
- Thông tin sản phẩm
- Hướng dẫn
Cảm biến gia tốc GY-521 6DOF IMU MPU6050 được sử dụng để đo 6 thông số: 3 trục Góc quay (Gyro), 3 trục gia tốc hướng (Accelerometer), là loại cảm biến gia tốc phổ biến nhất trên thị trường hiện nay, ví dụ và code dành cho nó rất nhiều và hầu như có trên mọi loại vi điều khiển, nếu bạn muốn mua cảm biến gia tốc GY-521 để làm các mô hình như con lắc động, xe tự cân bằng, máy bay,… thì MPU6050 sẽ là sự lựa chọn tối ưu.
THÔNG SỐ KỸ THUẬT
- Điện áp sử dụng: 3~5VDC
- Điện áp giao tiếp: 3~5VDC
- Chuẩn giao tiếp: I2C
- Giá trị Gyroscopes trong khoảng: +/- 250 500 1000 2000 degree/sec
- Giá trị Acceleration trong khoảng: +/- 2g, +/- 4g, +/- 8g, +/- 16g
- Board mạch mạ vàng, linh kiện hàn tự động bằng máy chất lượng tốt nhất.
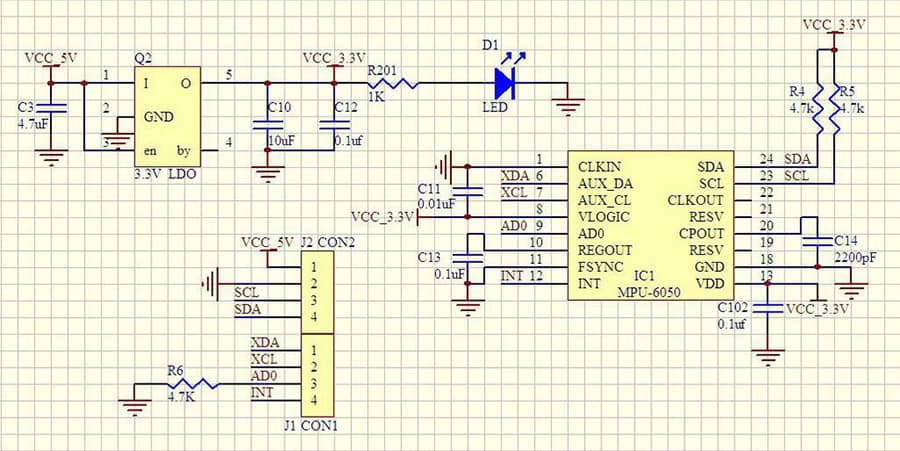
SƠ ĐỒ NGUYÊN LÝ:
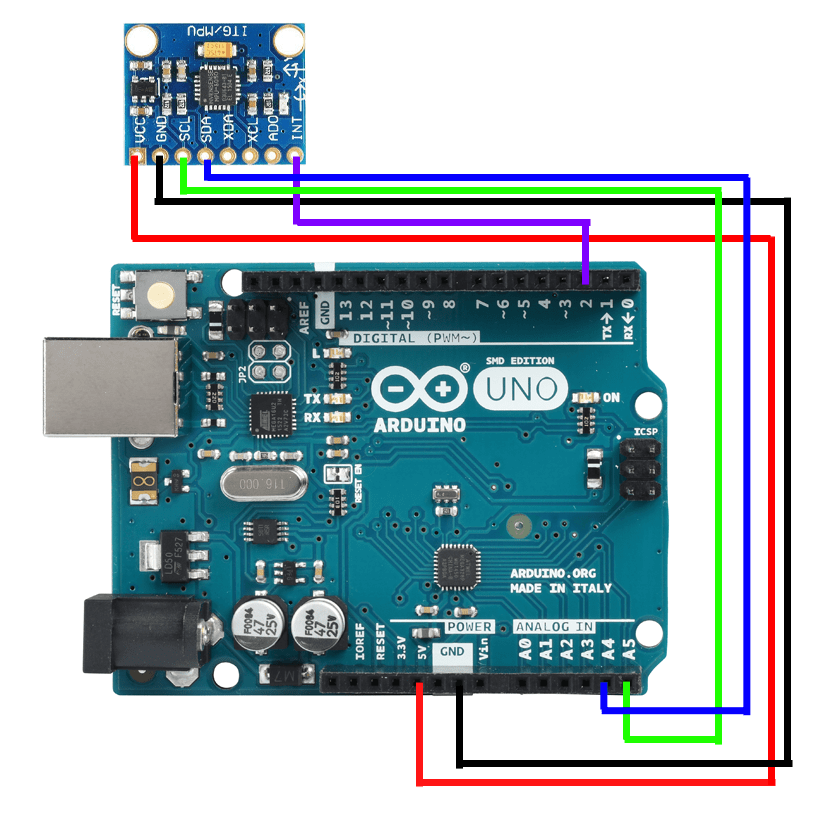
SƠ ĐỒ KẾT NỐI CẢM BIẾN GIA TỐC GY-521 6DOF IMU MPU6050:
Code tham khảo
Thư viện MPU6050_tockn.h: https://github.com/tockn/MPU6050_tockn
/***************************************************
Kết nối:
MPU6050 UNO R3 MEGA
VIN 5V 5V
GND GND GND
SCL A5 SCL
SDA A4 SDA
Nạp code mở Serial Monitor chọn No line ending, baud 9600.
****************************************************/
#include <MPU6050_tockn.h>
#include <Wire.h>
MPU6050 mpu6050(Wire);
void setup() {
Serial.begin(9600);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
}
void loop() {
mpu6050.update();
Serial.print("angleX : ");
Serial.print(mpu6050.getAngleX());
Serial.print("\tangleY : ");
Serial.print(mpu6050.getAngleY());
Serial.print("\tangleZ : ");
Serial.println(mpu6050.getAngleZ());
}Hình của Cảm Biến gia tốc GY-521 6DOF IMU MPU6050
Xem thêm
Thu gọn
Xin mời nhập nội dung tại đây


