







Cảm biến siêu âm US-100
Mã sản phẩm: (Đang cập nhật...)
Thương hiệu: cập nhật
Còn hàng
Liên hệ


Freeship đơn hàng từ 500k

Kiểm tra khi nhận hàng

Hỗ trợ khách hàng 24/7
- Thông tin sản phẩm
- Hướng dẫn
Cảm biến siêu âm US-100 có thể thực hiện chức năng phạm vi không tiếp xúc 2cm ~ 4,5m, với dải đầu vào điện áp rộng 2,4 ~ 5,5V, tiêu thụ năng lượng tĩnh dưới 2mA và cảm biến nhiệt độ của chính nó để điều chỉnh kết quả phạm vi. Với GPIO, cổng nối tiếp và các phương thức liên lạc khác, với bộ giám sát, công việc ổn định và đáng tin cậy.
THÔNG TIN CẢM BIẾN SIÊU ÂM US-100
- Mô-đun này là phiên bản cải tiến và bản thân mô-đun đã được bù nhiệt độ.
- Bảng mạch mô-đun 20 * 45 mm độ dày 15mm
- Mô-đun có hiệu suất ổn định và khoảng cách đo chính xác: độ chính xác mô-đun cao, vùng mù (dưới 2cm), phạm vi ổn định
THÔNG SỐ KỸ THUẬT
- Điện áp sử dụng: DC5V
- Dòng điện tĩnh: Dưới 2mA
- VCC: 5V
- GND: 0V
- Góc cảm ứng: Không quá 15 độ
- Khoảng cách phát hiện: 2cm -450cm
- Độ chính xác cao: Lên tới 1mm
- File tài liệu kỹ thuật
Thông số điện
- Mô-đun siêu âm US-100
- Điện áp làm việc DC 2.4V ~ 5.5V
- Dòng chế độ nghỉ 2mA
- Nhiệt độ làm việc -20 ~ + 70 độ
- Chế độ đầu ra Cấp hoặc UART (lựa chọn nắp nhảy)
- Góc cảm ứng dưới 15 độ
- Khoảng cách phát hiện 2cm-450cm
- Phát hiện chính xác 0,3cm + 1%
- Cấu hình cổng nối tiếp trong chế độ UART
- Tốc độ baud là 9600, bit start là 1 bit, bit stop là 1 bit, bit dữ liệu là 8 bit, không có chẵn lẻ, không kiểm soát luồng.
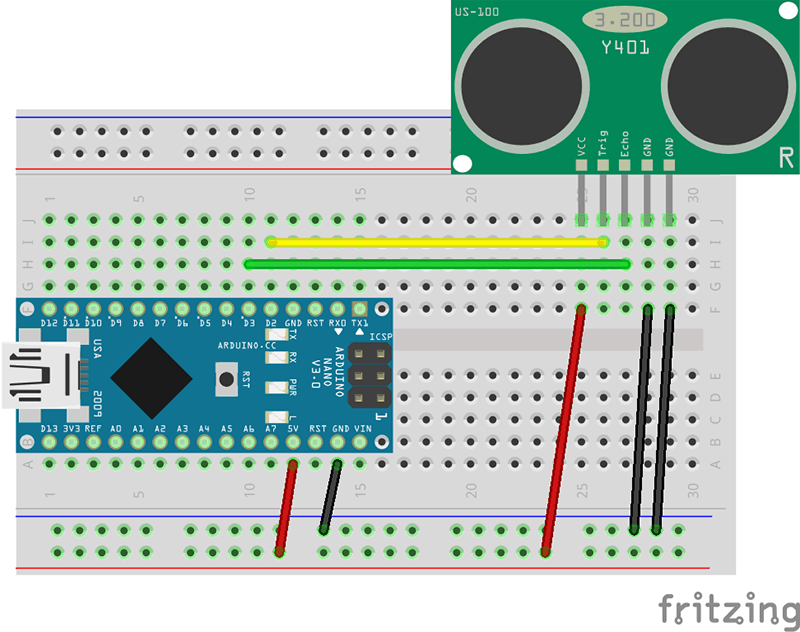
SƠ ĐỒ KẾT NỐI:
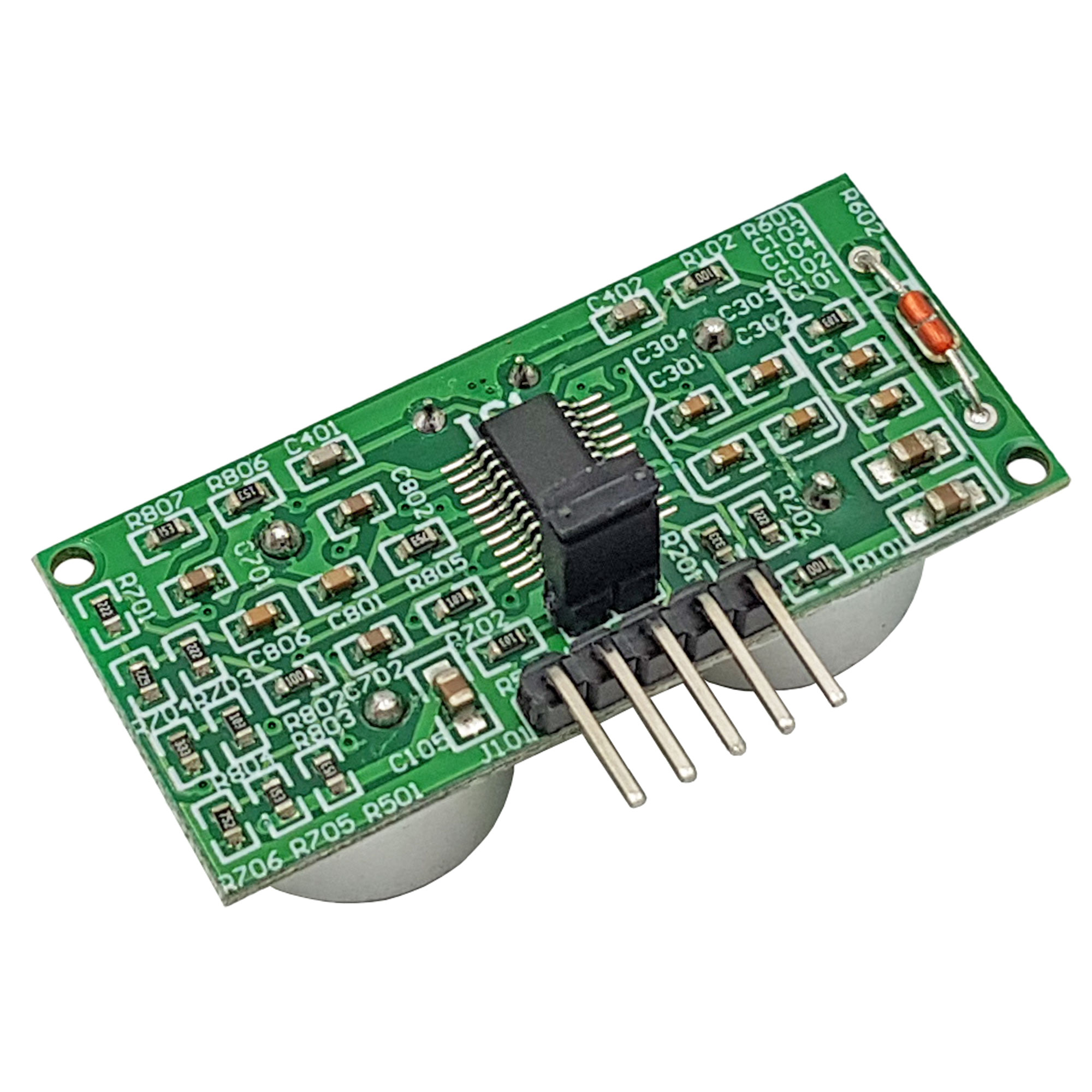
HÌNH ẢNH SẢN PHẨM:


——————-CODE THAM KHẢO————————
#include <SoftwareSerial.h>;
const int US100_TX = 2;// trig
const int US100_RX = 3;// echo
SoftwareSerial puertoUS100(US100_RX, US100_TX);
unsigned int MSByteDist = 0;
unsigned int LSByteDist = 0;
unsigned int mmDist = 0;
int temp = 0;
void setup() {
Serial.begin(9600);
puertoUS100.begin(9600);
}
void loop() {
puertoUS100.flush();
puertoUS100.write(0x55);
delay(100);
if(puertoUS100.available() >= 2)
{
MSByteDist = puertoUS100.read();
LSByteDist = puertoUS100.read();
mmDist = MSByteDist * 256 + LSByteDist;
if((mmDist > 1) && (mmDist < 10000))
{
Serial.print("Distancia: ");
Serial.print(mmDist, DEC);
Serial.println(" mm");
}
}
puertoUS100.flush();
puertoUS100.write(0x50);
delay(500);
if(puertoUS100.available() >= 1)
{
temp = puertoUS100.read();
if((temp > 1) && (temp < 130))
{
temp -= 45;
Serial.print("Temperatura: ");
Serial.print(temp, DEC);
Serial.println(" ºC.");
}
}
delay(100);
}
Xem thêm
Thu gọn
Xin mời nhập nội dung tại đây


