



Module Cảm Biến Gia Tốc ADXL345
Mã sản phẩm: (Đang cập nhật...)
Thương hiệu: cập nhật
Còn hàng
Liên hệ


Freeship đơn hàng từ 500k

Kiểm tra khi nhận hàng

Hỗ trợ khách hàng 24/7
- Thông tin sản phẩm
- Hướng dẫn
Module cảm biến gia tốc ADXL345 là module cảm biến độ nghiêng 3 trục, tiêu thụ năng lượng thấp, độ phân giải cao. Module cảm biến gia tốc ADXL345 thường dùng trong các thiết bị di động, có chức năng đo gia động từ các chuyển động hoặc rung động của vật thể..


THÔNG SỐ KỸ THUẬT
- Điện áp hoạt động: 3.3VDC / 5VDC
- Dòng điện tiêu thụ: 23uA
- Độ phân giải: 10 bit (độ phân giải tối đa 13 bit)
- Giao tiếp: SPI hoặc I2C
- Kích thước: 14 x 19mm
- Nhiệt độ hoạt động: -40 đến +85°C
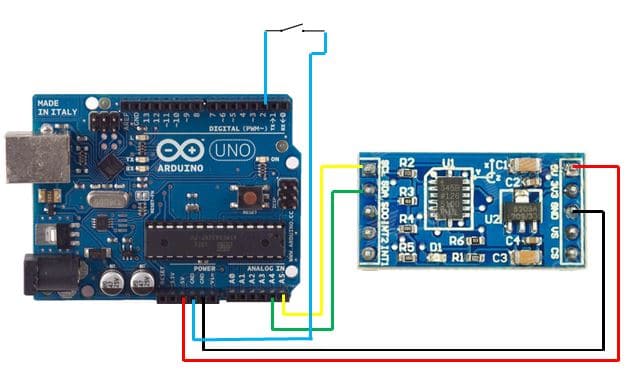
SƠ ĐỒ KẾT NỐI CẢM BIẾN GIA TỐC ADXL345
————————CODE THAM KHẢO—————————
/*
* Kết nối:
* ADXL345 Arduino
* VCC 5V
* GND GND
* SCL SCL
* SDA SDA
*
*/
#include
#include
#include
/* Assign a unique ID to this sensor at the same time */
Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);
float AccelMinX = 0;
float AccelMaxX = 0;
float AccelMinY = 0;
float AccelMaxY = 0;
float AccelMinZ = 0;
float AccelMaxZ = 0;
void setup(void)
{
Serial.begin(9600);
Serial.println("ADXL345 Accelerometer Calibration");
Serial.println("");
/* Initialise the sensor */
if(!accel.begin())
{
/* There was a problem detecting the ADXL345 ... check your connections */
Serial.println("Ooops, no ADXL345 detected ... Check your wiring!");
while(1);
}
}
void loop(void)
{
Serial.println("Type key when ready...");
while (!Serial.available()){} // wait for a character
/* Get a new sensor event */
sensors_event_t accelEvent;
accel.getEvent(&accelEvent);
if (accelEvent.acceleration.x < AccelMinX) AccelMinX = accelEvent.acceleration.x;
if (accelEvent.acceleration.x > AccelMaxX) AccelMaxX = accelEvent.acceleration.x;
if (accelEvent.acceleration.y < AccelMinY) AccelMinY = accelEvent.acceleration.y;
if (accelEvent.acceleration.y > AccelMaxY) AccelMaxY = accelEvent.acceleration.y;
if (accelEvent.acceleration.z < AccelMinZ) AccelMinZ = accelEvent.acceleration.z;
if (accelEvent.acceleration.z > AccelMaxZ) AccelMaxZ = accelEvent.acceleration.z;
Serial.print("Accel Minimums: "); Serial.print(AccelMinX); Serial.print(" ");Serial.print(AccelMinY); Serial.print(" "); Serial.print(AccelMinZ); Serial.println();
Serial.print("Accel Maximums: "); Serial.print(AccelMaxX); Serial.print(" ");Serial.print(AccelMaxY); Serial.print(" "); Serial.print(AccelMaxZ); Serial.println();
while (Serial.available())
{
Serial.read(); // clear the input buffer
}
}
Xem thêm
Thu gọn
Xin mời nhập nội dung tại đây


